Avalés les uns derrière les autres, ces minuscules engins robotisés s'assemblent d'eux-mêmes dans le tube digestif. Une fois réunis, ils peuvent filmer ou effectuer un prélèvement, voire une intervention réparatrice. Aboutissement
du projet international Ares, cette réalisation commence à prendre forme.
Pour étudier l'intérieur du tube digestif, les chirurgiens disposent aujourd'hui d'outils perfectionnés. Un des derniers en date,
la Pillcam, est une caméra miniaturisée qui peut être avalée. Mais la pénétration par les voies naturelles impose une limite de taille, donc de complexité, et ces petits explorateurs restent pour l'instant cantonnés à ces missions simplistes. D'où cette idée : envoyer un dispositif scindé en plusieurs éléments capables de coopérer une fois dans le tube digestif.
C'est dans ce sens que travaillent depuis deux ans des équipes de quatre pays (
Italie, Espagne, France et Suisse), réunies dans
le projet Ares (Assembling Reconfigurable Endoluminal Surgical system). Leurs résultats seront présentés cette semaine
à Nice lors de la
conférence Iros 2008 (International Conference on Intelligent RObots and Systems).
 Des capsules maintenues par des aimants : l'assemblage est simple mais il a fallu tester de multiples configurations, différant par la longueur, la disposition des aimants et leur force. © ETH Zurich
Des capsules maintenues par des aimants : l'assemblage est simple mais il a fallu tester de multiples configurations, différant par la longueur, la disposition des aimants et leur force. © ETH ZurichLiens magnétiques
Le principal problème de cette approche modulaire est de réunir les différents appareils injectés dans le tube digestif. Pour tester les solutions envisageables, l'équipe suisse de l'
ETH (Institut fédéral de technologie, à Zurich) s'est servi d'un magnifique modèle d'estomac transparent. Empli de liquide, il a permis de mettre les prototypes en situation. La solution retenue est magnétique. De multiples configurations ont été testées. La meilleure prend la forme de capsules, d'une certaine longueur, réunies par des petits aimants. Dans la plupart des cas, ils consentent à s'assembler en un ensemble opérationnel.
Grâce au champ magnétique, les chercheurs disent pouvoir vérifier que l'assemblage s'est bien déroulé. Les mouvements péristaltiques (qui font progresser les aliments) se chargent ensuite de fournir l'énergie motrice à cette équipe de robots désormais soudés. En multipliant les éléments, plusieurs fonctions pourraient être intégrées à ce petit train, au moins une caméra et sans doute un système de prélèvements d'échantillons.
Pour l'instant, l'équipe a encore devant elle la vérification de l'innocuité de ces petites barres métalliques et aimantées. Il restera ensuite à intégrer des dispositifs actifs et l'on pourra peut-être, un jour, avaler un train...
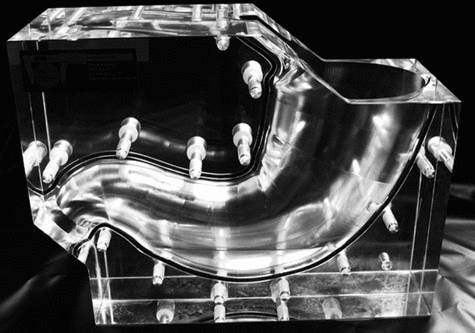 Ceci est un estomac... Cette maquette a servi à tester les configurations de modules et d'aimants. © ETH Zurich
Ceci est un estomac... Cette maquette a servi à tester les configurations de modules et d'aimants. © ETH Zurich



